کامپیوتر خود را با ریموت کنترل ، از راه دور کنترل کنید ! ! !
کامپیوتر خود را با ریموت کنترل ، از راه دور کنترل کنید ! ! !
در این بخش شما را با ساخت یک سخت افزار بسیار ساده ، پرکاربرد ، ارزان قیمت و جالب برای کامپیوتر آشنا میکنم که به کمک آن میتوانید کامپیوتر خانگی خود را با ریموت کنترل دستگاه های مختلف نظیر : تلویزیون ، ویدئو ، رسیور و به طور کلی هر ریموت کنترل از نوع مادون قرمز کنترل کنید.
سخت افزار ما برای ارتباط با کامپیوتر از پورت سریال استفاده میکند و از دقت و حساسیت بسیار بالایی برخوردار است از اینرو هیچگونه محدودیتی برای قرار دادن گیرنده در جلوی کیس وجود ندارد و میتوان آن را در پست کیس نیز جاسازی کرد. با توجه به اندازه ی بسیار کوچک مدار گیرنده ساخته شده ، به راحتی میتوان آن را در کاور کانکتور پورت سریال جایسازی کرد که عکس نمونه ی ساخته شده ی آن را در تصاویر خواهید دید.
نرم افزار درایوری که برای این سخت افزار به شما معرفی میکنم برخلاف انواع مختلف آن که در اینترنت موجود است بسیار پرقدرت ، دقیق ، بدون دردسر ، کم حجم ، رایگان و به طور کلی کاملا" کاربر پسند میباشد. این نرم افزار آلمانی است و به صورت دو زبانه در اینترنت قرار داده شده است که زبان پیش فرض آن انگلیسی میباشد.
شما با کمک این نرم افزار و گیرنده ی ساجته شده میتوانید تمامی دستورهایی را که توسط کیبورد و موس و غیره به سیستم خود اعمال میکنید، از طریق یک ریموت کنترل ساده و از فاصله ی دور انجام دهید .
برای مثال:
در ابتدا شما باید قطعات زیر را تهیه کنید:
-
آی سی سه پایه TSOP 1738 (معروف به چشم تلویزیون پارس است ) .*
-
آی سی رگولاتور ۵ ولت 78L05 .**
-
خازن شیمیایی 4.7uF
-
مقاومت 4.7KΩ
-
دیود 1N4148
-
کانکتور پورت سریال DB9
-
کاور کانکتور پورت سریال در صورت تمایل
*. در خرید آی سی TSOP1738 دقت کنید. حتما" نوعی را خریداری کنید که در پشت آی سی دو خط رنگی کشیده شده و دارای پایه های یک پارچه میباشد. ممکن است بر روی آن TSOP1238 نوشته باشد که هیچ اشکالی ندارد .(مطابق عکس)
**. رگولاتور 79L05 دارای ابعاد کوچکتری نسبت به آی سی 7805 عادی دارد که باعث کوچکتر شدن مدار میشود اما در صورتی که ابعاد برای شما مهم نباشد میتوانید از نوع معمولی این آی سی ها استفاده کنید. در عکس زیر میتوانید ترتیب پایه های این نوع آی سی را مشاهده کنید.
به دلیل ساده بودن مدار این دستگاه برای ساخت میتوانید از فیبر مدار چاپی استفاده نکنید و پابه های قطعات را مستقیما" مطابق نقشه مدار به یکدیگر لحیم کرده و توسط چسب دو قلو مدار گیرنده را عایق کنید.
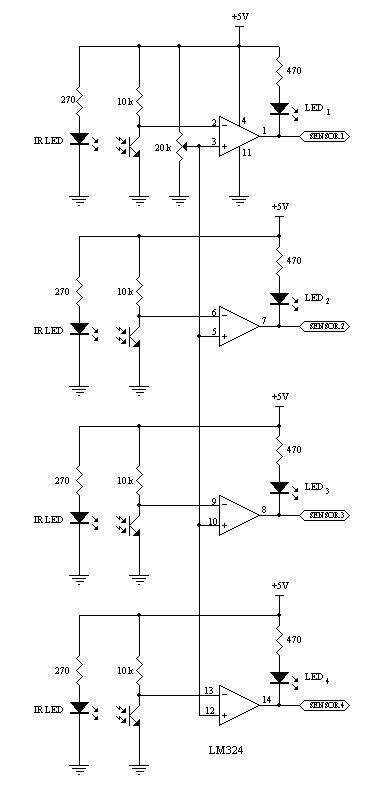
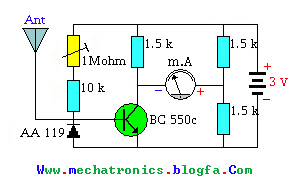
در شکل های زیر مدار مربوط به سخت افزار گیرنده را میبینید که باید با دقت و حوصله آن را پیاده سازی کنید:
درایور :
پس از ساخت بخش سخت افزاری ، نوبت به بخش توضیحات نرم افزار و طریقه ی نصب و راه اندازی میرسد .
نرم افزار پر قدرت رایگان نوشته شده توسط Steffen Schirmer را دانلود کنید و پس از نصب آن مراحل زیر را انجام دهید:
دانلود درایور (پسورد فایل زیپ کلمه foad میباشد)
سخت افزار آماده شده را به پورت سریال (Com1 یا Com2) متصل کنید. پس از نصب نرم افزار ، در گوشه ی سمت راست پایینی دسکتاپ خود (در کنار ساعت ویندوز) یک مکعب سفید رنگ را مشاهده میکنید بر روی مکعب سفید رنگ مطابق شکل راست کلیک کنید و گزینه ی Settings را انتخاب کنید.
در صفحه ی باز شده گزینه ی Directly use a infrared hardware receiver را تیک دار کنید و دقت کنید که گزینه ی Default/WinLirc فعال باشد.
Receiver COM-Port را با توجه به اینکه گیرنده را به Com1 یا Com2 وصل کرده اید تنظیم کنید.
در قسمت General ، گزینه ی Start Miriserver on Windows startup را تیک دار کنید و در آخر برای ثبت تغییرات کلید Apply را کلیک کنید و با کلیک کردن بر روی ok از محیط نرم افزار خارج شوید.
مشاهده میکنید که در گوشه ی سمت راست پایینی دسکتاپ ، مکعب سفید تبدیل به یک مکعب رنگی شد. بر روی مکعب رنگی کلیک کنید تا صفحه ی Manage Functions نمایان شود.
بر روی New function کلیک کنید و در صفحه ی باز شده یک اسم را که مربوط به کار خاصی است وارد کنید. برای مثال : Mouse up را برای بالا رفتن فلش ماوس وارد کنید و ok کنید درصفحه ی باز شده (Choose command) بر روی Emulate mouse کلیک کنید سپس بر روی Movement و در آخر بر روی upward کلیک کنید پنجره ی Learn Key On Remote Control باز میشود که به شما اعلام میکند دکمه ای از کنترل را که میخواهید نشانگر ماوس را بالا ببرد انتخاب کنید و پس از فشردن دکمه ی مورد نظر پنجره محو میشود که به معنی سلامت سخت افزار شما و تایید کلید فشرده شده میباشد. این کار را برای توابع دیگر نظیر پایین آمدن ماوس ، چپ و راست کردن ، کلیک کردن ، زیاد و کم کردن صدا و ... با توجه به کلیدهای ریموت کنترل انجام دهید. سعی کنید از ریموت کنترل های تلویزیون و ریموت های با کیفیت استفاده کنید. در اینکه کدام دکمه از کنترل را برای چه عملی فشار میدهید محدودیتی وجود ندارد ولی سعی کنید از دکمه های مربوط به هر تابع استفاده کنید برای مثال از Vol + برای زیاد کردن صدا استفاده کنید.
New Function--> انتخاب یک اسم به دلخواه --> انتخاب تابع مورد نظر از پنجره choose a command --> فشردن کلید مورد نظر از ریموت کنترل
شایان ذکر است که کلیه ی این مراحل را تنها یک بار انجام می دهید و در دفعات بعدی به راحتی میتوانید از استفاده از این دستگاه لذت ببرید. این نرم افزار دارای ویژگی ها و امکانات بسیار جالبی است که با کمی حوصله میتوانید تمامی آنها را فرا بگیرید.
شکل زیر نمونه ی ساخته شده ی گیرنده است :
در سایت زیر روش ساخت نمونه ی این سخت افزار برای استفاده با پورت usb را خواهید دید که در آن از میکروکنترلر استفاده شده است:
http://www.cesko.host.sk/IgorPlugUSB/IgorPlug-USB%20(AVR)_eng.htm
در صورتی که در هر بخش سوال و یا اشکالی داشتید در قسمت نظرات سوالات خود را مطرح کنید.




{kind=link}